Untitled Document
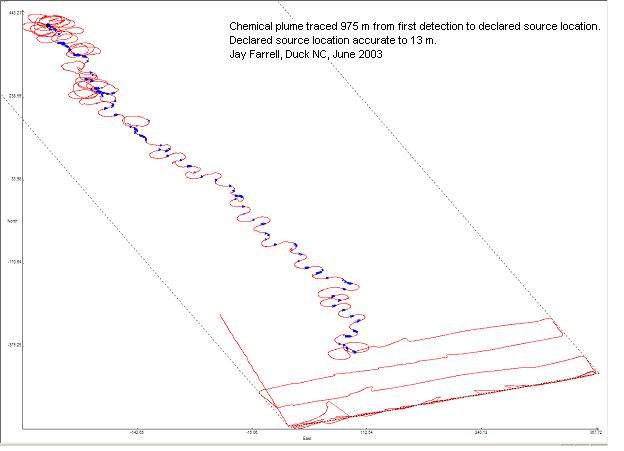
This page summarizes a few of the outcomes of the ONR and DARPA supporter Chemical Plume Tracing (CPT) project. This project successfully demonstrated an autonomous underwater vehicle, operating in the Atlantic ocean in the near-shore environment off Duck, NC, tracking a chemical plume for 975 m from a first point-of-contact to its source and declaring the source location with an accuracy of 13 meters.

======= Publications resulting from this project =================================
- J.A. Farrell, J. Murlis, W. Li, R.T. Carde, ''Filament-Based Atmospheric Dispersion Model to Achieve Short Time-Scale Structure of Odor Plumes,'' Environmental Fluid Mechanics, vol. 2, pp. 143-169, 2002.
- J.A. Farrell, S. Pang, W. Li, ''Plume Mapping via Hidden Markov Methods,'' IEEE Trans. SMC-B, 33, 6, 850-863, 2003.
- R. M. Arrieta, J. A. Farrell, W. Li, S. Pang, ''Initial Development and Testing of an Adaptive Mission Planner for a Small Unmanned Underwater Vehicle,'' Proc. Of the 22nd Int. Conf. On Offshore Mechanics and Artic Engineering, Cancun, Mexico, OMEA2003-37273, 2003.
- J. A. Farrell, W. Li, S. Pang, R. Arrieta, ''Chemical Plume Tracing Experimental Results with a REMUS AUV,'' MTS/IEEE Oceans 2003, San Diego, CA, 962-968, 2003.
- S. Pang, J. A. Farrell, R. M. Arrieta, W. Li, ''AUV Reactive Planning: Deepest Point,'' MTS/IEEE Oceans 2003, San Diego, CA, 2222-2226, 2003.
- J. A. Farrell, S. Pang, W. Li., R. Arrieta, ''Biologically Inspired Chemical Plume Tracing Demonstrated on an Autonomous Underwater Vehicle,'' IEEE Systems, Man, and Cybernetics Conference, Hague, Netherlands, 5991-5996, 2004.
- J. A. Farrell, S. Pang, W. Li, ''Chemical Plume Tracing via an Autonomous Underwater Vehicle,'' IEEE J. of Oceanic Engineering, 30, 2, 428-442, 2005.
- S. Pang, J. A. Farrell, ''Chemical Plume Source Localization,'' IEEE Systems, Man, and Cybernetics - Part B: Cybernetics, 36, 5, 1068-1080, 2006.
======= Plume simulation resulting from this project =================================
The EFM article above presents a dynamic model suitable for generating realistic chemical sensor readings for an AUV traveling in the vicinity of a chemical plume generated by release of a chemical in a turbulent flow field. The windows source and executable are contained in a zip file downloadable via the following link.
Zipped Simulation.
Please note:
- If you use the simulation in an article, please acknowledge usage and cite whichever of articles above relate to the publication.
- The simulation is released without support or warranty. The executable has been tested and works up to Windows 7.

