Real-time Vision-Aided Inertial Navigation
| Motivation |
In this work we address the problem of pose estimation using measurements from an Inertial Measurement Unit (IMU) and observations of visual features from a single camera. The main characteristic of vision sensing is that images are high-dimensional measurements. Feature extraction methods can typically detect and track hundreds of features in images, which, if properly used, can result is excellent localization results. However, the high volume of data also poses a significant challenge for estimation algorithm design. When real-time localization performance is required, one is faced with a fundamental trade-off between the computational complexity of an algorithm and the resulting estimation accuracy.
| Contribution |
The main contribution of this work is an algorithm that is able to optimally utilize the localization information of the feature measurements, while having computational complexity only linear in the number of features. Our approach is motivated by the observation that, when a static feature is viewed from several camera poses, it is possible to define geometric constraints involving all these poses. The key towards achieving real-time performance is the derivation of a novel measurement model, which expresses these constraints without including the 3D feature position in the filter state vector. The resulting EKF-based estimation algorithm is capable of high-precision, real-time pose estimation, and thus can employed in demanding applications such as UAV localization, vision-aided navigation for precise spacecraft landing, tracking the pose of mobile robots, etc.
| Experimental Results |
The performance of this algorithm has been demonstrated in both in real-world experiments, and in extensive simulation tests. We here describe the results of: (i) a large-scale experiment in an uncontrolled urban environment, and (ii) an experiment in a typical office environment.
For the outdoor experiment an IMU/camera sensor payload was mounted on top of a car moving in a residential area of Minneapolis. The car traveled a total distance of approximately 3.2 km, over a time period of 9 min. The camera used for this experiment is an IEEE 1394 camera, recording images of resolution 640 x 480 pixels at a rate of 3 Hz, while the IMU is an Inertial Science ISIS IMU, recording inertial measurements at 100 Hz.
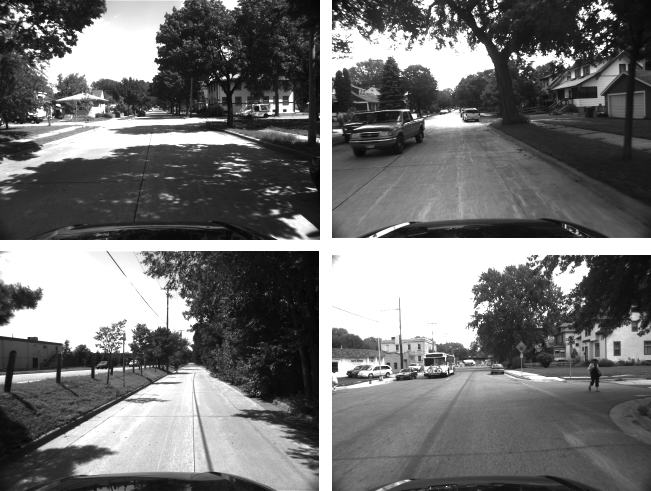
Some example images from the recorded dataset are displayed below:
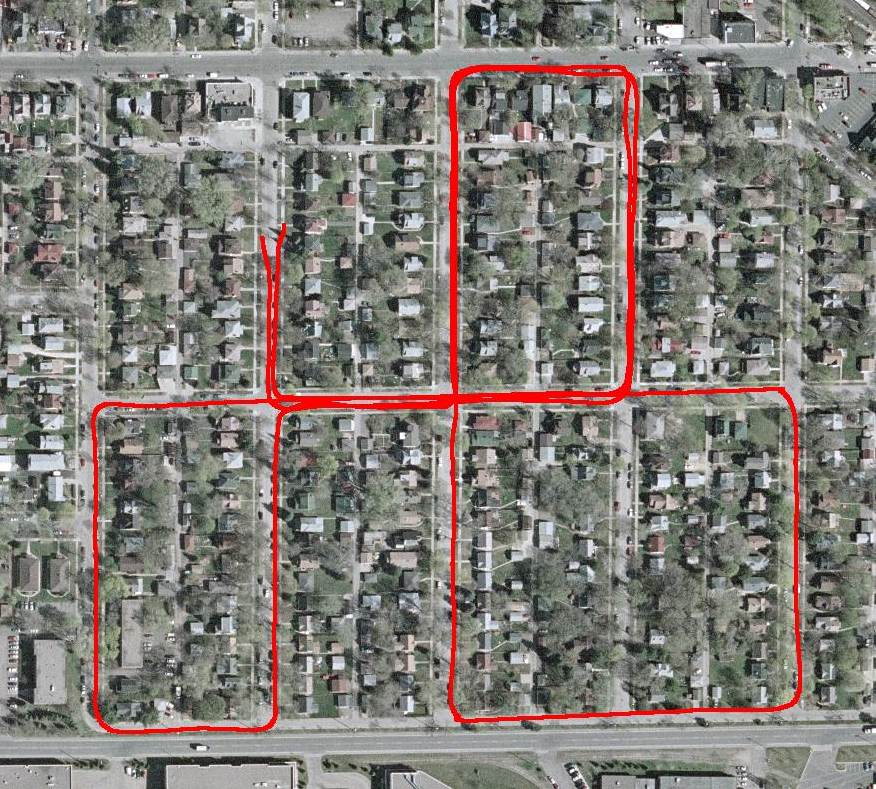
As shown in the above example images, several moving objects appear in the image sequence, and moreover, the leaves of the trees move due to the wind. Despite these challenging conditions, the filter was able to successfully and accurately track the position, velocity, and attitude of the vehicle. The estimated trajectory, superimposed on a satellite map of the area, is shown below:
In addition to the satellite map, we also superimpose the estimated trajectory on a street map:
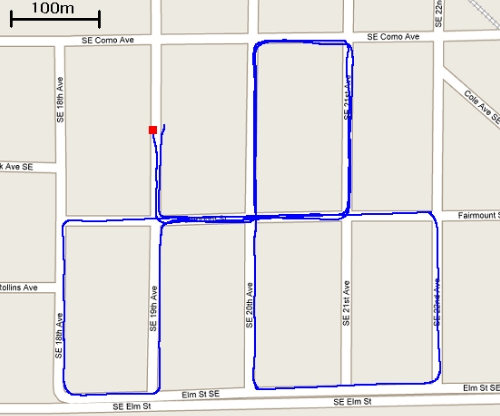
Even though ground
truth for the entire trajectory is not available, from the above plots we can
conclude that the estimated trajectory closely follows the street layout. The final
position error is known, and it is approximately 10 m (i.e., approx. 0.3% of the traveled distance).
This excellent position accuracy is achieved without loop closing, and
without using prior information about the motion (for example, nonholonomic
constraints or a street map). It is also worth noting that even though images
were only recorded at 3Hz due to limited hard disk space on the test system, the
estimation algorithm is able to process the dataset at 14Hz, on a single core of
an Intel T7200 processor (2GHz clock rate). During the experiment, a total of
142903 features were successfully tracked and used for EKF updates.
The following two files are videos (at different resolutions) of the view of the camera while driving and the estimated position of the vehicle superimposed on the street map of the area:
File 1: all 1598 image frames, original resolution (40MB) *
File 2: odd frames only, half resolution (10MB) *
*: When using Windows Media Player, you may need to first save the file (Save Target As...) before opening. Otherwise, an error message may appear.
In addition to the above outdoor experiment, we have also tested the algorithm's performance in an indoors experiment. In this case, the IMU/camera system moves in a typical office setting (the main MARS lab office). Some example images from the sequence are the following:
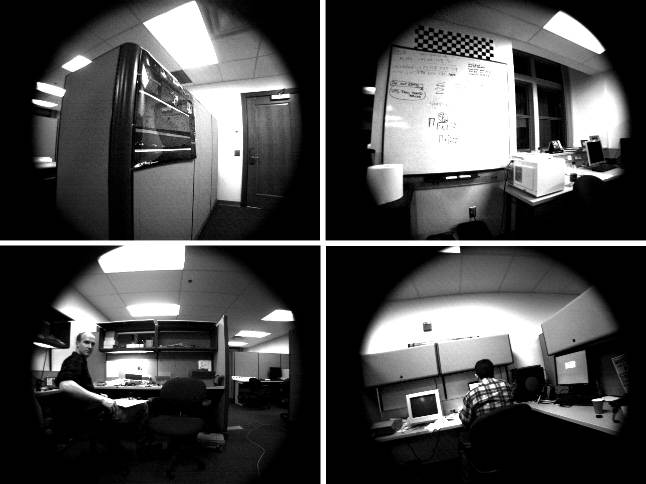
Note that for this experiment we have used a wide-angle lens, which creates the black areas at the periphery of the images. Here is a snapshot of the 3D trajectory estimate:
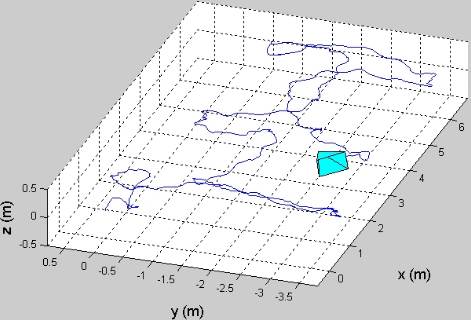
The trajectory in this case is approximately 84m long, while the final error is less than 40cm (i.e. error approximately equal to 0.5% of the traveled distance). The video showing the 688 recorded images, as well as the estimated trajectory, can be downloaded from the following links:
File 1: original image resolution (21MB) *
File 2: half resolution (7.5MB) *
*: When using Windows Media Player, you may need to first save the file (Save Target As...) before opening. Otherwise, an error message may appear.
| Related Publication |
A.I. Mourikis, S.I. Roumeliotis: "A Multi-state Constraint Kalman Filter for Vision-Aided Inertial Navigation," Proceedings of the IEEE International Conference on Robotics and Automation, April 10-14 2007, Rome, Italy, pp. 3565-3572.
| Acknowledgements |
This work was supported by the University of Minnesota (DTC), the NASA Mars Technology Program (MTP-1263201), and the National Science Foundation (EIA-0324864, IIS-0643680).