Team Members: Greg Luker and Monica Morales
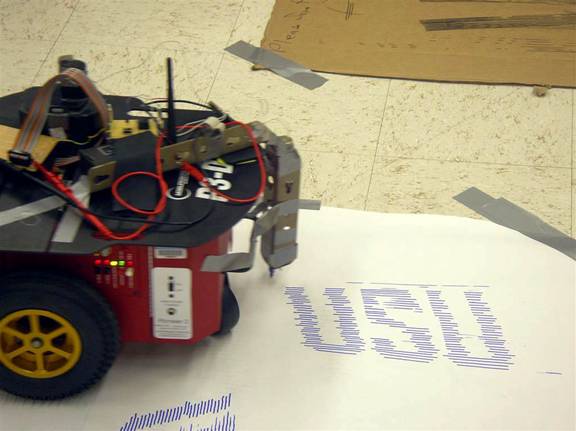
The main goal of this project is to plot a picture on a piece of paper using an ActivMedia robot with a pen and the necessary hardware attached. Essentially we want to build a plotter/printer that, given coordinates, plots a picture, hence the project named RoboPlot Potential applications include parking lot painting and tile laying.